Élément graphique 1

Élément graphique 2

Élément graphique 3

Élément graphique 4
Élément graphique 5

Élément graphique 6

Élément graphique 7

Élément graphique 8
Élément graphique 9

Élément graphique 10

Élément graphique 11

Élément graphique 12
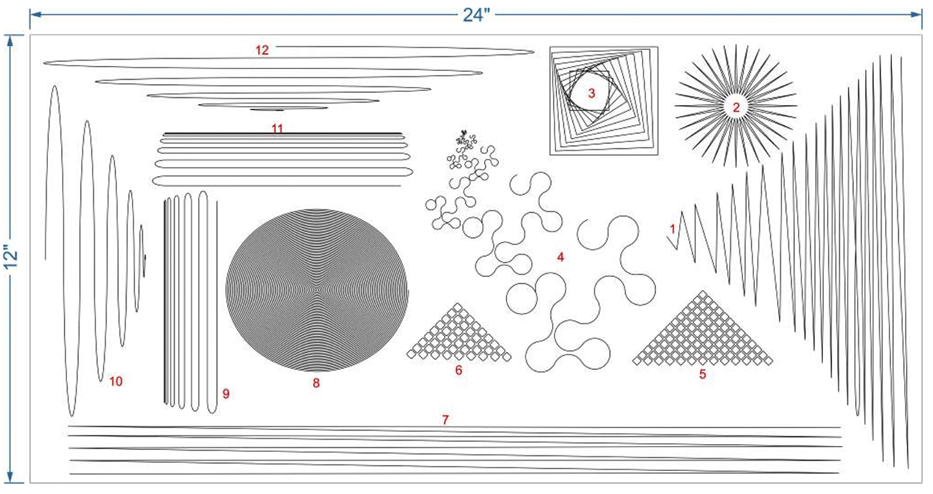
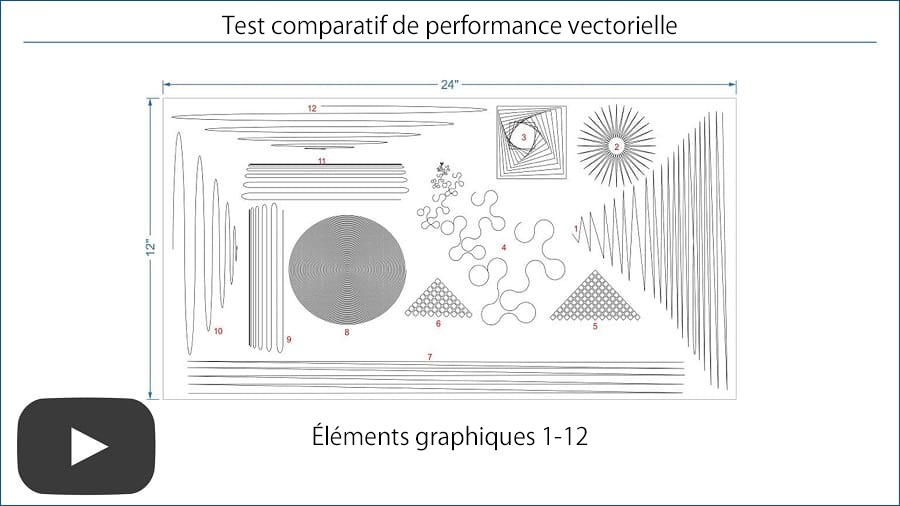
La performance vectorielle, également appelée mode vectoriel, est principalement utilisée pour la découpe et la gravure et le marquage de trait unique. Dans ce test, 12 éléments graphiques ont été développés pour tester des aspects différents de la performance vectorielle lors du traitement des matières par laser. Des réglages ont été ajustés sur chaque système laser dans la comparaison pour optimiser la performance tout en obtenant une qualité comparable et acceptable du PLS6.150D (ULS) et deux systèmes concurrents, Système E et Système T.
Chaque élément graphique a été testé pour déterminer les réglages les plus efficaces qui donnaient une qualité acceptable. La qualité a été définie par deux paramètres : la précision avec laquelle le mouvement suivait le chemin prévu et le marquage uniforme sur le graphique. Tout un ensemble de courbes, cercles, carrés et lignes ont été utilisés pour déterminer la performance du système dans différentes géométries. Le graphique globale a été traité sur une feuille 24"x12" d'aluminium anodisé.
Les tests de chaque élément ont été effectués initialement à une vitesse et une accélération maximales. Pour certains éléments graphiques, ceci a donné une qualité acceptable. En revanche, d'autres éléments ont nécessité des ajustements au niveau des réglages du système. Étant donné que chaque système possède différents réglages pour ajuster la qualité, une méthodologie cohérente a été utilisée pour trouver les paramètres optimaux de chaque système. Chaque élément graphique a été ajusté indépendamment des autres de sorte que chaque élément a été exécuté au niveau de performance maximal possible donnant une qualité acceptable.
Le délai et le classement de chaque système d'un élément graphique spécifique sont les suivants. Tous les délais ont été mesurés depuis le début du traitement du graphique de conception jusqu'à la fin du graphique. Le mouvement depuis la position « initiale » et le retour n'ont pas été inclus.
| Fichier de conception | ULS | Classement | Système E | Classement | Système T | Classement |
| Élément graphique 1 ► | 0:15 ✔ | 1er (égalité) | 00:29 | 2è | 0:15 ✔ | 1er (égalité) |
| Élément graphique 2 ► | 00:09 ✔ | 1er | 0:15 | 3è | 00:11 | 2è |
| Élément graphique 3 ► | 00:12 ✔ | 1er | 00:21 | 3è | 0:15 | 2è |
| Élément graphique 4 ► | 00:44 ✔ | 1er | 00:46 | 2è | 00:47 | 3è |
| Élément graphique 5 ► | 00:51 ✔ | 1er | 00:52 | 2è | 01:00 | 3è |
| Élément graphique 6 ► | 00:37 ✔ | 1er | 00:41 | 2è | 00:47 | 3è |
| Élément graphique 7 ► | 00:09 | 2è | 00:19 | 3è | 00:07 ✔ | 1er |
| Élément graphique 8 ► | 01:29 ✔ | 1er | 02:57 | 2è | 05:20 | 3è |
| Élément graphique 9 ► | 00:13 ✔ | 1er | 00:24 | 2è | 00:52 | 3è |
| Élément graphique 10 ► | 00:13 ✔ | 1er | 00:34 | 2è | 00:39 | 3è |
| Élément graphique 11 ► | 00:14 ✔ | 1er | 00:34 | 2è | 01:00 | 3è |
| Élément graphique 12 ► | 00:11 ✔ | 1er | 00:20 | 3è | 00:14 | 2è |
| Délai d'exécution total | 05:17 ✔ | 1er | 08:32 | 2è | 11:27 | 3è |
| Délai d'exécution relatif | 1,0 | 1,62 | 2,18 |
| Système | 1er | 2è | 3è |
| PLS6.150D (ULS) | 11 | 1 | 0 |
| Système E | 0 | 8 | 4 |
| Système T | 2 | 3 | 7 |
Vidéo indiquant tous les éléments du PLS6.150D (ULS) exécutant les scénarios du test par rapport à Système E et Système T
Élément graphique 1
Élément graphique 2
Élément graphique 3
Élément graphique 4
Élément graphique 5
Élément graphique 6
Élément graphique 7
Élément graphique 8
Élément graphique 9
Élément graphique 10
Élément graphique 11
Élément graphique 12
Le système PLS6.150D a bien réussi pour les graphiques du test. Un planificateur sophistiqué de chemins qui optimise l'accélération et la vitesse de manière indépendante et dynamique avec la possibilité d'adapter l'accélération indépendamment de la vélocité permet au système d'être efficace pour tout un ensemble de graphiques.
Le Système E a mieux réussi que le Système T au niveau des scores généraux mais moins bien que le PLS6.150D. Le Système E n'a pas été aussi efficace dans le traitement des graphiques avec des courbes complexes combinées à de longues caractéristiques rectilignes.
Le Système T arrive à la troisième place derrière le Système E et le PLS6.150D. Problèmes principaux qui ont affecté la performance du système : manque de réglage pour contrôler l'accélération indépendamment de la vitesse, associé à la planification de chemins au niveau des courbes, ce qui donne une performance loin d'être optimale. Le seul contrôle disponible pour améliorer la qualité est la vitesse globale du système qui doit être considérablement réduite pour maintenir la qualité lorsque le graphique comporte des courbes plus petites.
Ces résultats illustrent une conclusion majeure : le type de moteur (pas-à-pas ou servo) est une considération non pertinente lors de la comparaison de systèmes pour la performance optimale. Le système de laser ULS utilise des moteurs pas-à-pas et les deux systèmes concurrents utilisent des servomoteurs. Pour la performance vectorielle globale, le système de laser ULS est le vainqueur incontesté. Les deux types de technologie de moteurs sont également capables d'excellentes performances. La différence ne réside pas dans le type de moteur utilisé ou dans sa capacité de vitesse supérieure, mais plutôt dans la conception et le contrôle du système de positionnement global des faisceaux. Les systèmes de laser ULS utilisent des systèmes de déplacement extrêmement légers avec des rails linéaires personnalisés conçus spécifiquement pour le traitement au laser. Des matériaux légers de l'aéronautique sont utilisés globalement, au lieu des roulements linéaires lourds en acier solide standard utilisés sur d'autres systèmes. Cette technologie personnalisée, combinée à un logiciel sophistiqué de planification des chemins, permet aux systèmes de laser ULS de surpasser ses concurrents pour les applications vectorielles réelles utilisant des moteurs pas-à-pas numériques fiables.
